
Similar to an IQC-analysis, an IQC-based controller synthesis starts with an LFT description of an uncertain (open-loop) system interconnection. IQClab assumes that this description is known and satisfies the following constraints:
 is a (possibly unstable) open-loop MIMO LTI plant that admits a state space description and who’s in- and outputs interact with the uncertainty block
is a (possibly unstable) open-loop MIMO LTI plant that admits a state space description and who’s in- and outputs interact with the uncertainty block  , the scheduling block
, the scheduling block  , and the control block
, and the control block  In addition,
In addition,  and
and  denote the generalized disturbance input and performance output respectively. These are weighted by the frequency dependent weighting functions
denote the generalized disturbance input and performance output respectively. These are weighted by the frequency dependent weighting functions  and
and  . From now on, we tacitly assume that these are integrated in the generalized plant .
. From now on, we tacitly assume that these are integrated in the generalized plant . is the uncertainty block, which is assumed to have a block diagonal structure
is the uncertainty block, which is assumed to have a block diagonal structure  . The properties of the individual blocks should be compatible with those from the class iqcdelta (See details).
. The properties of the individual blocks should be compatible with those from the class iqcdelta (See details).- is the so-called scheduling block. This block depends on a parameter vector whose information is available online and can be taken into account to schedule the controller accordingly by adjusting its gains. Also this block should be compatible with the ones from the class iqcdelta (See details).
 is the to-be-designed LTI part of the controller.
is the to-be-designed LTI part of the controller. is the to-be-designed control gain scheduling function.
is the to-be-designed control gain scheduling function.
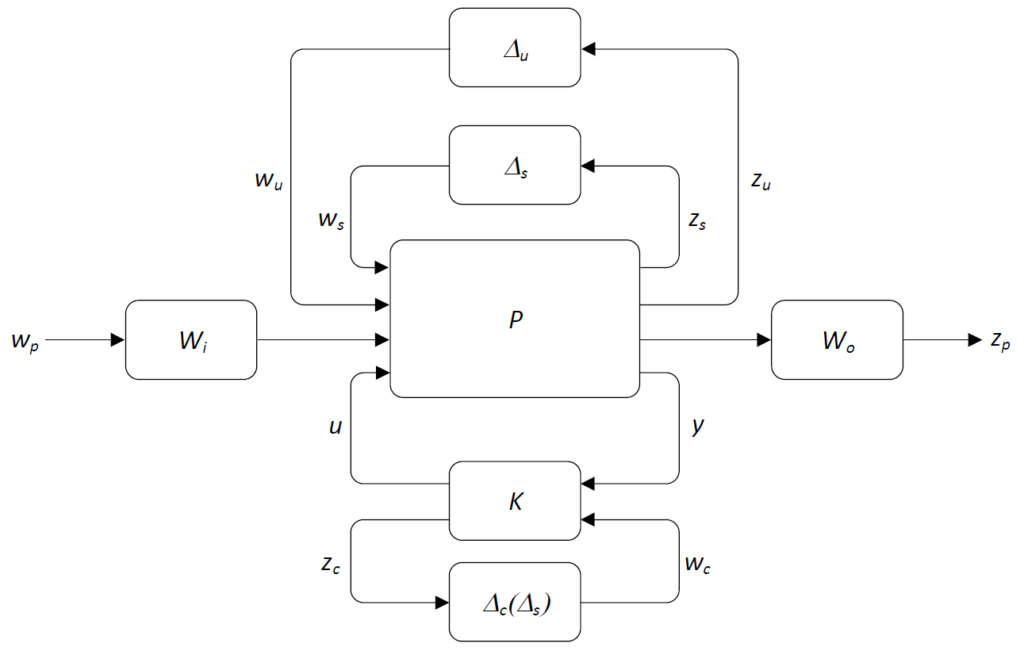
The aim of the IQC-synthesis tools is to design controllers that are compatible with (i.e., can be obtained as special cases from) the interconnection shown in the figure above). The technical details are discussed next. Currently, the following synthesis algorithms are included in the toolbox.
 -controller synthesis with extra options
-controller synthesis with extra options